
metadata
task_categories:
- object-detection
tags:
- yolo
- yolo11
- hardhat
- hat
datasets:
- luisarizmendi/safety-equipment
base_model:
- Ultralytics/YOLO11
widget:
- src: >-
https://huggingface.co/datasets/mishig/sample_images/resolve/main/football-match.jpg
example_title: Football Match
- src: >-
https://huggingface.co/datasets/mishig/sample_images/resolve/main/airport.jpg
example_title: Airport
pipeline_tag: object-detection
model-index:
- name: yolo11-safety-equipment
results:
- task:
type: object-detection
dataset:
type: safety-equipment
name: Safety Equipment
args:
epochs: 35
batch: 2
imgsz: 640
patience: 5
optimizer: SGD
lr0: 0.001
lrf: 0.01
momentum: 0.9
weight_decay: 0.0005
warmup_epochs: 3
warmup_bias_lr: 0.01
warmup_momentum: 0.8
metrics:
- type: precision
name: Precision
value: 0.9078
- type: recall
name: Recall
value: 0.9064
- type: mAP50
name: mAP50
value: 0.9589
- type: mAP50-95
name: mAP50-95
value: 0.6088
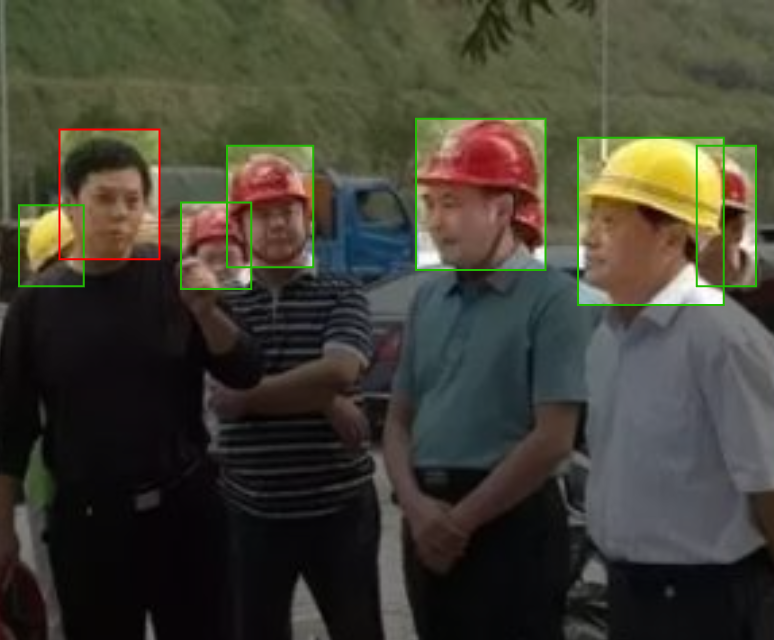
Model for detecting Hardhats and Hats
Model binary
You can download the model from here
Labels
- hat
- helmet
- no_helmet
Model metrics


Model Dataset
https://universe.roboflow.com/luisarizmendi/hardhat-or-hat
Model training
Notebook
You can review the Jupyter notebook here
Hyperparameters
epochs: 35
batch: 2
imgsz: 640
patience: 5
optimizer: 'SGD'
lr0: 0.001
lrf: 0.01
momentum: 0.9
weight_decay: 0.0005
warmup_epochs: 3
warmup_bias_lr: 0.01
warmup_momentum: 0.8
Augmentation
hsv_h=0.015, # Image HSV-Hue augmentationc
hsv_s=0.7, # Image HSV-Saturation augmentation
hsv_v=0.4, # Image HSV-Value augmentation
degrees=10, # Image rotation (+/- deg)
translate=0.1, # Image translation (+/- fraction)
scale=0.3, # Image scale (+/- gain)
shear=0.0, # Image shear (+/- deg)
perspective=0.0, # Image perspective
flipud=0.1, # Image flip up-down
fliplr=0.1, # Image flip left-right
mosaic=1.0, # Image mosaic
mixup=0.0, # Image mixup
Usage
Usage with Huggingface spaces
If you don't want to run it locally, you can use this huggingface space that I've created with this code but be aware that this will be slow since I'm using a free instance, so it's better to run it locally with the python script below.

Usage with Python script
Install the following PIP requirements
gradio
ultralytics
Pillow
opencv-python
torch
Then run the python code below and then open http://localhost:7860 in a browser to upload and scan the images.
import gradio as gr
from ultralytics import YOLO
from PIL import Image
import os
import cv2
import torch
def detect_objects_in_files(files):
"""
Processes uploaded images for object detection.
"""
if not files:
return "No files uploaded.", []
device = "cuda" if torch.cuda.is_available() else "cpu"
model = YOLO("https://github.com/luisarizmendi/ai-apps/raw/refs/heads/main/models/luisarizmendi/object-detector-safety/object-detector-safety-v1.pt")
model.to(device)
results_images = []
for file in files:
try:
image = Image.open(file).convert("RGB")
results = model(image)
result_img_bgr = results[0].plot()
result_img_rgb = cv2.cvtColor(result_img_bgr, cv2.COLOR_BGR2RGB)
results_images.append(result_img_rgb)
# If you want that images appear one by one (slower)
#yield "Processing image...", results_images
except Exception as e:
return f"Error processing file: {file}. Exception: {str(e)}", []
del model
torch.cuda.empty_cache()
return "Processing completed.", results_images
interface = gr.Interface(
fn=detect_objects_in_files,
inputs=gr.Files(file_types=["image"], label="Select Images"),
outputs=[
gr.Textbox(label="Status"),
gr.Gallery(label="Results")
],
title="Object Detection on Images",
description="Upload images to perform object detection. The model will process each image and display the results."
)
if __name__ == "__main__":
interface.launch()